뉴스
뉴스
 리서치
리서치
 마켓정보
마켓정보
 라운지
라운지
 커뮤니티
커뮤니티
 매체소개
매체소개
 고객센터
고객센터























 0
0



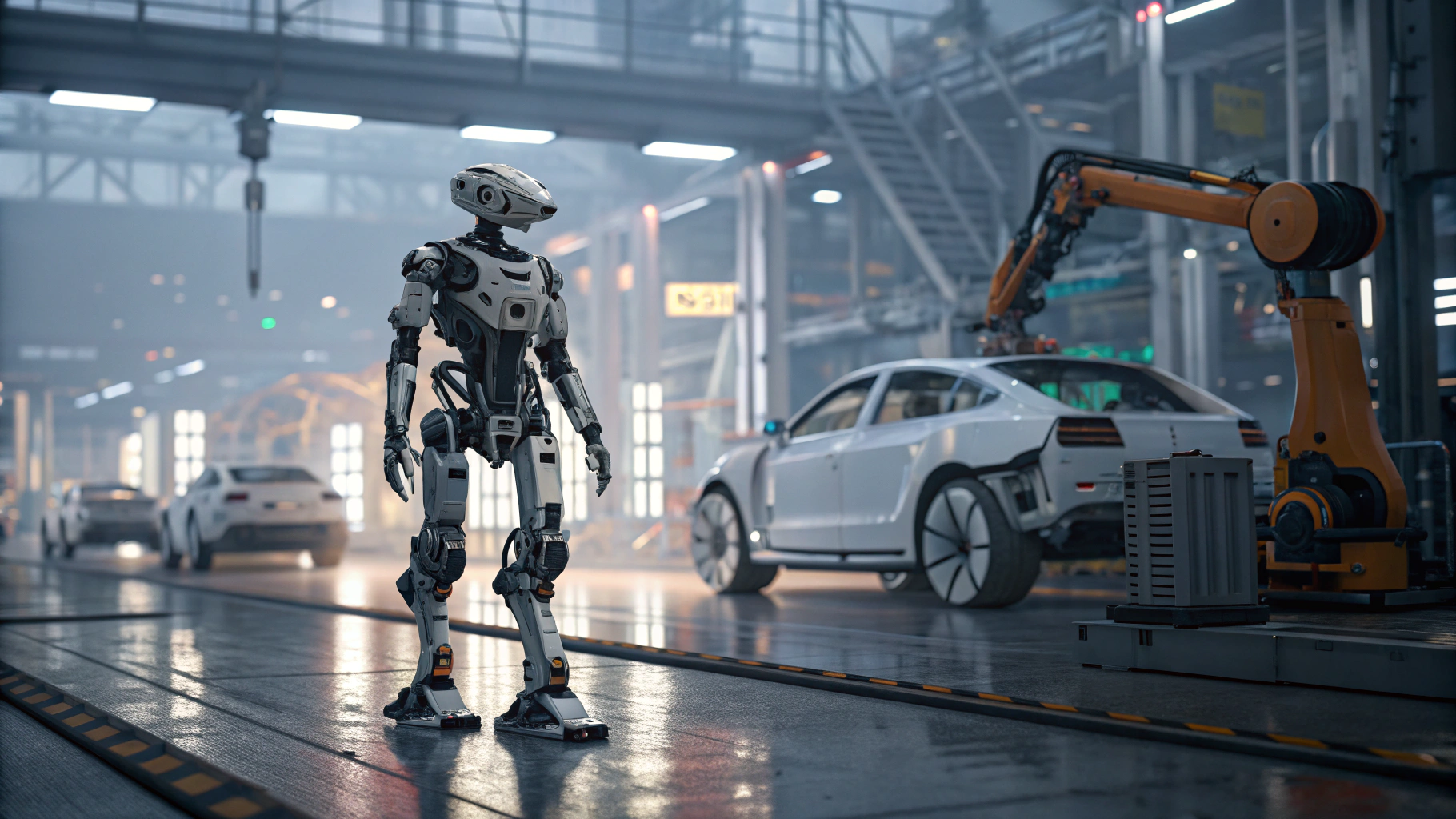
엔비디아(NVDA)가 자율주행차, 로봇 개발, 스마트시티 구축을 위한 인공지능(AI) 플랫폼과 도구를 대거 공개하며 AI 산업의 차세대 로드맵을 제시했다. 이번 발표는 프랑스 파리에서 열린 엔비디아 GTC 파리 콘퍼런스를 통해 이루어졌으며, 유럽 완성차 업체들과 협력한 자율주행차 솔루션 ‘엔비디아 드라이브(Drive)’가 그 중심에 섰다.
‘드라이브’는 AI 학습을 위한 DGX 시스템과 GPU, 시뮬레이션과 합성데이터 생성을 위한 오브니버스(Omniverse), 코스모스(Cosmos)에 이르기까지 다양한 기술을 통합한 풀스택 플랫폼이다. 차량 내 실시간 데이터를 처리하는 AGX 컴퓨터까지 포함해, 엔비디아는 이 시스템이 전통적인 ‘모듈식’ 설계의 비효율성을 극복하고 더 안전하고 효율적인 자율주행 개발을 가능케 한다고 강조했다.
자율주행차의 운영 안전성 강화를 위한 신규 시스템도 발표됐다. 올해 초 도입된 안전 아키텍처 ‘엔비디아 할로스(Halos)’는 하드웨어, 소프트웨어, AI 모델, 툴을 포괄하는 종합 플랫폼이다. 콘티넨탈, 소니, 옴니비전 등 기존 파트너뿐 아니라, 보쉬, 누로, 이지레인 등 새로운 자동차 기술 기업들의 합류로 영향력을 넓히고 있다.
이와 함께 엔비디아는 세계이해 기반 AI 모델인 ‘코스모스 프리딕트 2(Cosmos Predict-2)’를 출시했다. 해당 모델은 방대한 도로 환경 예측 데이터를 기반으로 고해상도 시뮬레이션 생성이 가능하며, 운전자와 로봇의 행동 예측 정확도를 대폭 높였다. 2만 시간 분량의 실제 운전 데이터를 후훈련하면서 안개, 비 등 까다로운 조건에서도 탁월한 성능을 입증했다.
데이터센터 GPU에 최적화된 엔비디아 NIM 마이크로서비스 형태로 제공되는 ‘코스모스 트랜스퍼’와 이미지 보완 도구 ‘NuRec 픽서’도 함께 공개됐다. 이 기술들은 엔비디아의 3D 시뮬레이션 플랫폼 오브니버스와 연동돼 AI 개발자들이 더 풍부한 훈련 데이터를 확보할 수 있게 돕는다.
한편, 오픈소스 자율주행 시뮬레이터 ‘CARLA’는 이번에 새롭게 코스모스 트랜스퍼와 NuRec 픽서를 통합했다. 이를 통해 15만 명 이상의 개발자들이 손쉽게 다양한 기상, 환경 조건을 반영한 합성 장면을 생성할 수 있는 길이 열렸다.
로보틱스 분야에도 대규모 업데이트가 적용됐다. 휴머노이드 로봇용 AI 모델 ‘아이작 GR00T N1.5(Isaac GR00T N1.5)’는 새로운 작업환경과 산업 현장에 더 유연하게 적응하며, 자재 운반과 제조 자동화에서 성능이 크게 향상됐다는 평가다. 이에 발맞춰 할로스 플랫폼 역시 로보틱스로 확장돼 보스턴 다이내믹스, 넥스코봇 등 여러 로봇 기업들이 안전성과 보안 요건 충족을 위해 엔비디아와 긴밀히 협력 중이다.
엔비디아는 스마트시티를 위한 AI 로드맵도 함께 밝혔다. ‘엔비디아 오브니버스 블루프린트’는 도시의 디지털 트윈을 구축하고, 교통, 재난 대응, 서비스 최적화를 위한 AI 에이전트를 실험하는 표준 플랫폼이다. 대만 가오슝시는 엔비디아와 함께 항공 이미지 기반의 3D 도시 모델을 활용해 시뮬레이션 환경을 구축했으며, 실시간 영상 분석을 통해 침수, 정체 등 도시 전반의 상황을 이해하고 대응하는 시스템을 개발 중이다.
이번 발표는 단순한 기술 공개를 넘어서 자율주행, 로보틱스, 스마트시티라는 핵심 산업 전반을 관통하는 AI 전략의 총체적 청사진을 제시했다는 점에서 큰 의미를 가진다. 시장 전문가들은 엔비디아의 AI 생태계가 이제는 칩을 넘어 전체 인프라와 시뮬레이션 체계로 확장되고 있다는 점에 주목하고 있다.




![[토큰분석] 블록체인 수익의 민낯: 상위 100개 체인 중 연매출 100만 달러 넘는 곳은 16개뿐](https://f1.tokenpost.kr/2026/03/lgrmjrk1bs.jpg)

![[크립토 인사이트 EP.23] 전쟁 속 비트코인만 올랐다…이란 공습이 증명한 '국가가 빼앗을 수 없는 돈'](https://f1.tokenpost.kr/2026/03/j5ovmevdat.jpg)

![[토큰포스트 칼럼] 폭격 속에 비트코인만 올랐다… 전쟁이 증명한 '국가가 빼앗을 수 없는 돈'](https://f1.tokenpost.kr/2026/03/xpm9uaxwlx.webp)








![[Episode 12] IXO™2024 참여하고, 2억원 상당 에어드랍 받자!](https://f1.tokenpost.kr/2024/03/bk2tc5rpf6.png)
![[Episode 11] 코인이지(CoinEasy) 에어드랍](https://f1.tokenpost.kr/2024/02/g0nu4cmps6.png)
![[Episode 8] Alaya 커뮤니티 입장하고, $AGT 받자!](https://f1.tokenpost.kr/2023/10/0evqvn0brd.png)
![[Episode 6] 아트테크 하고, 에어드랍 받자!](https://f1.tokenpost.kr/2023/08/3b7hm5n6wf.jpg)
![[토큰포스트] 기사 퀴즈 544회차](https://f1.tokenpost.kr/2026/03/vljjplabhq.jpg)
![[토큰포스트] 기사 퀴즈 543회차](https://f1.tokenpost.kr/2026/02/u4blgenuev.jpg)
![[토큰포스트] 기사 퀴즈 542회차](https://f1.tokenpost.kr/2026/02/ybgphvyjr7.jpg)
![[토큰포스트] 기사 퀴즈 541회차](https://f1.tokenpost.kr/2026/02/g27ndxvfxv.jpg)