뉴스
뉴스
 리서치
리서치
 마켓정보
마켓정보
 라운지
라운지
 커뮤니티
커뮤니티
 매체소개
매체소개
 고객센터
고객센터





















 0
0


국내 연구진이 외부 기기 없이도 이동과 진단, 치료가 가능한 차세대 의료용 마이크로로봇을 개발하면서, 정밀 의료 기술의 새로운 가능성을 열었다.
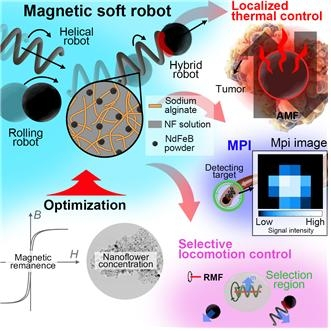
고려대학교 세종캠퍼스 전자정보공학과 김성훈 교수 연구팀은 8일, 자기입자영상 기술을 기반으로 인체 내부에서 자유롭게 이동하면서 질병을 찾아내고 치료까지 가능한 ‘전자기 테라노스틱스 마이크로로봇 플랫폼’을 개발했다고 밝혔다. 테라노스틱스란 진단(diagnostics)과 치료(therapeutics)를 결합한 용어로, 의료 기술의 융복합적 진보를 대표하는 분야다.
기존의 의료용 마이크로로봇 기술은 환자 몸속 위치를 파악하기 위해 방사선을 사용하는 CT나 X-ray, 고가의 광학장비에 의존해왔다. 이는 환자와 의료진 모두에게 방사능 노출 우려를 안기고, 전체 의료비 증가 요인으로 작용해왔다. 반면 이번에 개발된 로봇은 별도의 영상 기기 없이도 자기장을 활용해 정밀한 위치 추적이 가능하다는 점에서 큰 진전을 이룬 것으로 평가된다.
개발된 마이크로로봇은 약 2~3밀리미터 크기로, 자기입자영상(MPI) 신호를 통해 위치를 확인하고, 체내에서 목적지까지 스스로 이동할 수 있다. 특히 암세포가 있는 부위에 도달하면 로봇이 45도 정도까지 자신의 온도를 높여 해당 부위를 정밀하게 자극하거나, 자성열(자기장을 이용한 열 발생) 치료 기능까지 수행할 수 있다. 이 치료는 주변의 정상 세포 손상을 최소화하면서 종양만을 선택적으로 공격할 수 있는 방식이다.
김성훈 교수는 “기존에는 진단, 위치 제어, 치료 등이 각기 다른 시스템에 의해 이루어졌다면, 이번 기술은 이 모든 기능을 하나의 플랫폼으로 통합했다는 점이 핵심”이라고 설명했다. 연구팀은 이 로봇이 실제 혈류와 유사한 조건의 3차원 유동 시스템 안에서도 안정적으로 작동하는 것을 실험을 통해 입증했다고 밝혔다.
이번 연구 결과는 제조 및 나노기술 분야에서 권위 있는 국제학술지인 ‘익스트림 매뉴팩처링 인터내셔널 저널’ 2025년 7월호 온라인판에 게재됐다. 연구진은 향후 장기 생체 실험 및 임상 적용 가능성을 중심으로 후속 연구를 추진할 계획이다.
이 같은 기술은 향후 비침습적 정밀 진단과 맞춤형 치료를 동시에 구현하는 통합 의료 플랫폼의 개발로 이어질 가능성이 크다. 특히 최소한의 외부 장비로 고비용과 부작용을 줄이면서도 치료 효율을 높이려는 의료산업의 움직임에 결정적인 전환점이 될 것으로 기대된다.
![[저녁 뉴스브리핑] 트럼프 행정부, 비트코인 및 암호화폐 명확성 법안 7월 4일 처리에 낙관적 外](https://f1.tokenpost.kr/2026/06/kzmnmkp96v_th_860x0.webp)
![[오후 뉴스브리핑] 트럼프 행정부, 비트코인·암호화폐 명확성 법안 7월 4일 처리 가능성에 낙관 外](https://f1.tokenpost.kr/2026/06/u2c5n4l47w_th_860x0.webp)





![[저녁 시세브리핑] 암호화폐 시장 상승세… 비트코인 63,672달러, 이더리움 1,669달러](https://f1.tokenpost.kr/2026/06/16p2blnbkt_th_860x0.webp)


![[온체인분석] 고래는 이미 바닥을 산다…마지막 퍼즐은 '김치 프리미엄'](https://f1.tokenpost.kr/2026/06/3h20onuq7k_th_860x0.jpg)
![[경제분석]](https://f1.tokenpost.kr/2026/05/w37ryzne1n_th_860x0.jpg)
![[온체인분석] 월가, 마침내 온체인으로… 씨티](https://f1.tokenpost.kr/2026/06/gt1u45y890_th_860x0.png)






![[Episode 12] IXO™2024 참여하고, 2억원 상당 에어드랍 받자!](https://f1.tokenpost.kr/2024/03/bk2tc5rpf6_th_860x0.png)
![[Episode 11] 코인이지(CoinEasy) 에어드랍](https://f1.tokenpost.kr/2024/02/g0nu4cmps6_th_860x0.png)
![[Episode 8] Alaya 커뮤니티 입장하고, $AGT 받자!](https://f1.tokenpost.kr/2023/10/0evqvn0brd_th_860x0.png)
![[Episode 6] 아트테크 하고, 에어드랍 받자!](https://f1.tokenpost.kr/2023/08/3b7hm5n6wf_th_860x0.webp)
![[토큰포스트] 기사 퀴즈 614회차](https://f1.tokenpost.kr/2026/06/78z05tt5d5_th_860x0.webp)
![[토큰포스트] 기사 퀴즈 613회차](https://f1.tokenpost.kr/2026/06/ic0eg6efrk_th_860x0.png)
![[토큰포스트] 기사 퀴즈 612회차](https://f1.tokenpost.kr/2026/06/udozdrg7oz_th_860x0.webp)
![[토큰포스트] 기사 퀴즈 611회차](https://f1.tokenpost.kr/2026/06/tkoefcff8i_th_860x0.webp)